Planner
Role
The Planner module orchestrates a multi-target astrophotography session. It executes a list of planning lines, delegating slewing to the Navigator module and acquisition to the Sequencer module in turn. For each target it automatically loads a sequencer profile.
Required devices
| Device | Role |
|---|---|
| GPS | Observer geographic coordinates and time |
Planning structure
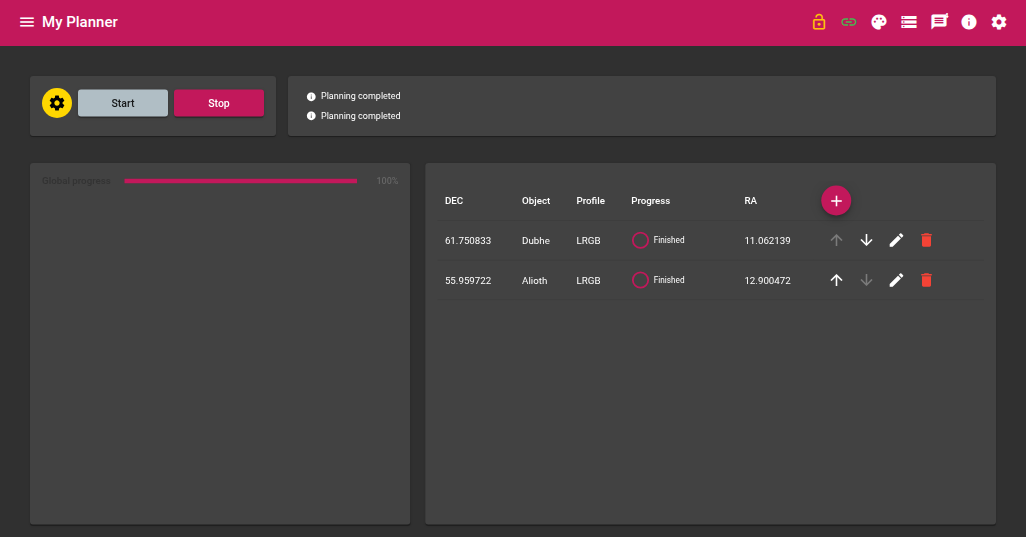
A planning is made up of several lines. Each line defines:
| Column | Description |
|---|---|
| Object | Target name |
| RA | Right ascension of the target (J2000) |
| DEC | Declination of the target (J2000) |
| Profile | Sequencer profile to load for this target |
| Progress | Completion status of the current line |
Lines are executed in order. They can be added manually or sent from the Navigator via the Add to planner action.
Parameters
Slave modules
| Parameter | Description |
|---|---|
| Sequencer instance | Name of the Sequencer module instance to drive |
| Navigator instance | Name of the Navigator module instance to drive |
Algorithm
Start
- Check INDI connection and slave modules
- Mark all lines as Queued
- Start the first line
Line execution
For each line of the planning:
- The Planner sets the Navigator’s target (RA, DEC, name)
- It loads the requested sequence profile into the Sequencer and sets the matching object name
- It triggers the Navigator’s Go to target action
- It waits for centering to complete (Navigator success event)
- It triggers the Sequencer’s Start sequence action
- It monitors acquisition progress and waits for the sequence to finish
- The line is marked Finished and the next line starts
Planning complete
When all lines have been processed, the global progress reaches 100 % and the module stops.
Progress
| Indicator | Description |
|---|---|
| Global progress | Number of lines processed out of the total |
| Per-line progress | Current acquisition progress, relayed from the Sequencer |
Actions
| Action | Description |
|---|---|
| Start | Starts executing the planning from the first line |
| Stop | Stops the current planning |