Guider
Rôle
Le module Guider assure le guidage automatique du télescope. Il détecte et suit un champ d’étoiles de référence, mesure la dérive en temps réel et envoie des impulsions de correction à la monture pour maintenir le pointage.
Appareils requis
| Appareil | Rôle |
|---|---|
| Caméra de guidage | Acquisition des images du champ de guidage |
| Interface ST4 | Réception des impulsions de correction — peut être la monture ou une caméra équipée d’un port ST4 |
Phases de fonctionnement
Le guidage se déroule en trois phases enchaînées.
Phase 1 — Initialisation
Le module acquiert une image de référence et identifie les étoiles présentes dans le champ. Ces étoiles servent de référence pour toute la session de guidage.
Phase 2 — Calibration
Le module mesure la réponse de la monture aux impulsions de correction :
- Envoi d’impulsions dans les quatre directions (N, S, E, O)
- Mesure du déplacement en pixels provoqué par chaque série d’impulsions
- Calcul du facteur de conversion pixels/ms pour chaque axe
- Détection automatique des sens de correction RA et DEC
Avant la série d’impulsions Nord et avant la série Sud, une impulsion supplémentaire de rattrapage backlash DEC est envoyée en premier pour rattraper le jeu mécanique de l’axe DEC — sinon les premières impulsions de mesure de chaque série seraient partiellement absorbées par le rattrapage de l’engrenage, faussant le taux ms/px calculé. Son propre déplacement résultant est écarté, il n’est pas inclus dans le calcul du taux.
Le résultat de calibration est sauvegardé et réutilisé automatiquement d’une session à l’autre, à condition que le côté de pier et l’orientation de la caméra n’aient pas changé.
Phase 3 — Guidage
Boucle de correction continue :
- Acquisition d’une image
- Identification des étoiles par correspondance de triangles (voir section dédiée)
- Calcul de la dérive par rapport à la position de référence
- Application des coefficients d’agressivité
- Si la compensation de backlash DEC est activée et que le sens de l’impulsion DEC s’est inversé depuis la dernière correction, ajoute l’estimation courante de compensation par-dessus l’impulsion calculée
- Envoi des impulsions de correction à la monture
- Mise à jour des statistiques (RMS RA, DEC, total)
- Si une impulsion d’inversion compensée a été envoyée au cycle précédent, compare la réduction de dérive réellement obtenue à celle prédite par le calcul seul, et ajuste l’estimation de compensation à la hausse (sous-compensation) ou à la baisse (sur-compensation), dans les bornes configurées
Les engrenages de monture ont un peu de jeu mécanique : à chaque inversion de sens du guidage DEC, les premières impulsions rattrapent ce jeu au lieu de produire un vrai mouvement, ce qui cause un pic de dérive temporaire. Comme le jeu réel varie selon la position de pointage et la charge mécanique, une valeur de compensation fixe a tendance à sous- ou sur-corriger selon où pointe la monture. L’estimation adaptative s’auto-règle à la place : chaque inversion sert à la fois de correction et de mesure, donc elle converge vers le jeu réellement présent plutôt qu’une valeur figée une fois pour toutes et vite désaccordée.
Algorithme de correspondance par triangles
La correspondance d’étoiles entre deux images repose sur la géométrie des triangles formés par les étoiles, invariante par translation, rotation et changement d’échelle.
Pour chaque triangle :
ratio = surface / périmètreCe ratio sert d’empreinte unique pour identifier les mêmes triangles entre l’image de référence et l’image courante. La dérive est ensuite calculée comme la translation moyenne entre toutes les paires d’étoiles identifiées.
Les impulsions de correction en RA sont multipliées par cos(DEC_monture) pour compenser la convergence des méridiens aux hautes déclinaisons.
Paramètres
Appareils
Ces paramètres sont accessibles depuis le menu Paramètres du module. Un jeu de paramètres peut être sauvegardé dans un profil.
| Paramètre | Description |
|---|---|
| Exposition | Durée d’exposition en secondes |
| Gain | Gain de la caméra |
| Décalage (offset) | Offset de la caméra |
Calibration
| Paramètre | Description |
|---|---|
| Durée impulsion | Durée en ms de chaque impulsion envoyée pendant la calibration |
| Pas de calibration | Nombre d’impulsions par axe et par direction |
| DEC backlash kick | Impulsion supplémentaire (ms) envoyée avant la série Nord et avant la série Sud, pour rattraper le jeu mécanique en premier — 0 désactive cette fonction |
Guidage
| Paramètre | Description |
|---|---|
| Impulsion max | Durée maximale d’une impulsion de correction (ms) |
| Impulsion min | Durée minimale d’une impulsion de correction (ms) |
| Agressivité RA | Fraction de la correction calculée appliquée en RA (0–100 %) |
| Agressivité DEC | Fraction de la correction calculée appliquée en DEC (0–100 %) |
| Seuil RMS | Facteur multiplicatif du RMS au-delà duquel une correction est ignorée |
| Inversion côté pier RA | Active l’inversion automatique du sens de correction RA au passage du méridien |
| Dither (pixels) | Amplitude du dithering en pixels |
Compensation de backlash DEC
| Paramètre | Description |
|---|---|
| Enable | Ajoute une impulsion supplémentaire adaptative à chaque inversion de sens du guidage DEC, pour rattraper le jeu mécanique avant que la correction réelle ne s’applique |
| Current compensation (ms) | Estimation adaptative, ajustée automatiquement après chaque inversion de sens DEC — indique une estimation de départ si tu la connais, sinon laisse à 0 et laisse-la apprendre |
| Minimum compensation (ms) | Borne basse de l’estimation adaptative |
| Maximum compensation (ms) | Borne haute de l’estimation adaptative |
| Adjustment step (ms) | Ampleur de l’ajustement à la hausse ou à la baisse après chaque inversion, selon la sous/sur-compensation mesurée |
Inversions manuelles
| Paramètre | Description |
|---|---|
| Inverser RA | Inverse manuellement le sens de correction RA |
| Inverser DEC | Inverse manuellement le sens de correction DEC |
Désactivation des corrections
| Paramètre | Description |
|---|---|
| Désactiver RA+ | Désactive les impulsions de correction RA dans le sens positif |
| Désactiver RA− | Désactive les impulsions de correction RA dans le sens négatif |
| Désactiver DEC+ | Désactive les impulsions de correction DEC dans le sens positif |
| Désactiver DEC− | Désactive les impulsions de correction DEC dans le sens négatif |
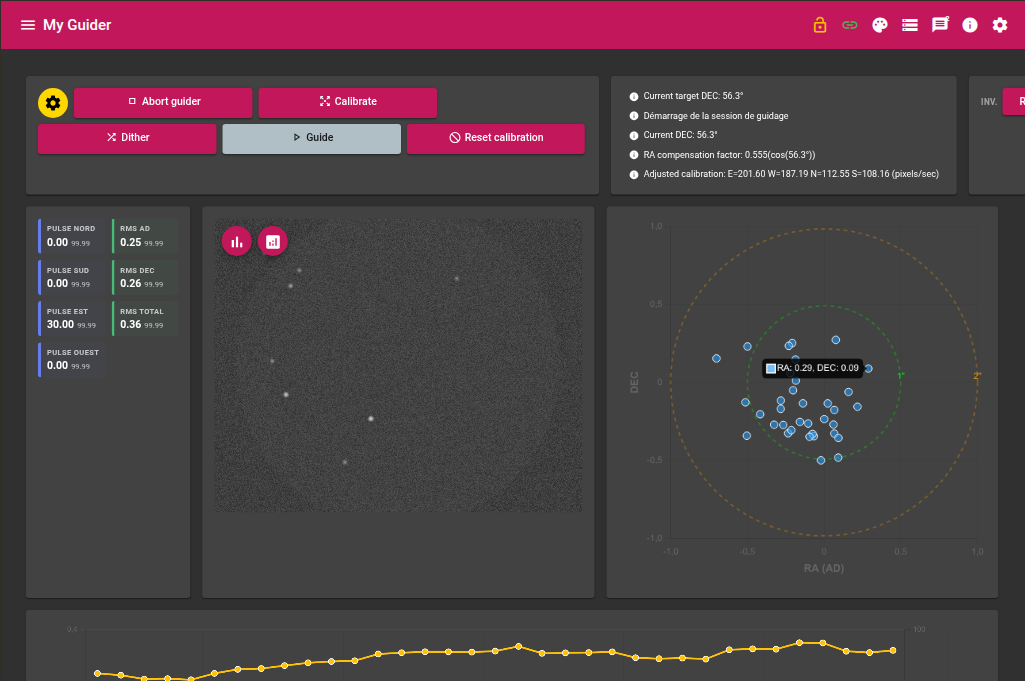
Valeurs affichées en temps réel
| Valeur | Description |
|---|---|
| Impulsion N | Durée de la dernière impulsion Nord (ms) |
| Impulsion S | Durée de la dernière impulsion Sud (ms) |
| Impulsion E | Durée de la dernière impulsion Est (ms) |
| Impulsion O | Durée de la dernière impulsion Ouest (ms) |
| RMS RA | Erreur quadratique moyenne de la dérive en RA (pixels) |
| RMS DEC | Erreur quadratique moyenne de la dérive en DEC (pixels) |
| RMS total | RMS combiné RA + DEC (pixels) |
Graphiques
Dérive (scatter)
Nuage de points XY représentant la dérive de chaque correction par rapport à la position de référence.
Guidage (séries temporelles)
Graphique de style PHD2 affichant pour chaque correction :
| Courbe | Description |
|---|---|
| Dérive RA | Dérive mesurée en RA (pixels) |
| Dérive DEC | Dérive mesurée en DEC (pixels) |
| Impulsion RA | Durée de l’impulsion de correction RA (ms) |
| Impulsion DEC | Durée de l’impulsion de correction DEC (ms) |
| SNR | Rapport signal/bruit de la détection d’étoiles |
| RMS | RMS total courant (pixels) |
Actions
| Action | Description |
|---|---|
| Calibrer et guider | Enchaîne les trois phases : initialisation → calibration → guidage |
| Calibrer | Exécute l’initialisation puis la calibration uniquement |
| Guider | Lance le guidage (utilise la calibration existante, ou calibre si nécessaire) |
| Abandonner | Interrompt immédiatement la séquence en cours |
| Réinitialiser la calibration | Efface la calibration sauvegardée |
| Dither | Décale aléatoirement la position de guidage de Dither (pixels) |